3D grid mapping
We flew the Mavic 2 pro by using pix4D capture of a mapping mission in a turf farm. We flew the Skydio 2 + in the last lab to get the 3D scan of objects and 2D map scan. We did 2D scan for 2D maps with the Mavic 2 pro. The main reason why we flew here is this place is so wide-open area that it is a good place for the 2D map scan.
Before going to fly, we checked the weather
conditions.
Weather condition
·
Temperature: 84F
·
Humidity: 42%
·
Visibility: 10mi
·
Windspeed: 8mph from South
And then we checked
the potential hazards in the street view of the Google Maps. We
got permission from LAANCE (Class D, 400 feet)
LAANCE APPROVAL: ALTVDX8NMR60
We made an emergency plan (return home,
land as soon as possible if the aircraft looks not stable)

(1340 Cherry Ln, West
Lafayette, IN 47907)
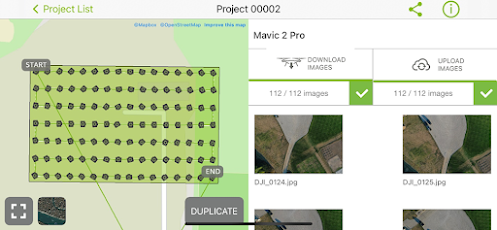
Parallel ‘lawn mower’
grid
We flew the Mavic 2 pro with a parallel ‘lawn mower’ grid at 60 meters altitude and a camera angle of 90-degree. The reason why we set up for that is we needed to scan the almost whole turf farm(528 * 321 ft) so we needed a high altitude and 90-degree camera angle. We also set up 80 % for lateral frontal overlaps for the high quality of the scan. We took 112 images for this scan.


|
Time to drive to
the field and set up for the mission |
1.5 hours |
|
Time to fly the
mission |
7 min 13s |
|
Number of images
taken |
61 pictures |
|
Size of each image |
5.38 mb |
|
Size of the entire
data |
0.67 gb
|
Opposing grid lines
We flew the Mavic 2
pro with opposing grid lines at 60 meters altitude and a camera angle of 80-degree
this time. We also set up for 80% for lateral frontal overlaps. As a result, we
took 61 images for this scan when we changed the camera angle from 80-degree to 90-degree.
Data Collection Outcomes
|
Time to drive to
the field and set up for the mission |
1.5 hours |
|
Time to fly the
mission |
8 min 26s |
|
Number of images
taken |
112 pictures |
|
Size of each image |
5.23 mb |
|
Size of the entire
data |
1.41 gb |
The ways to scan the land(skydio2 plus, mavic2 pro) were almost similar. But there were some differences when we scanned the land. In terms of Skydio 2 plus, we launched first before setting up everything for the scan. We were able to set the specific drone speed in skydio map scan. But we couldn’t choose the specific speed in pix 4d capture. In terms of white balance, we could choose between auto, sunny, and cloudy depending on the weather conditions.



Comments
Post a Comment